Domowe Eksperymenty Fizyczne
Rewelacyjnie prosty silnik elektryczny
Czytelnicy Delty zapewne pamiętają serię artykułów o bardzo prostych i pomysłowych silnikach elektrycznych. Najprostszy z nich składał się z małego magnesu, baterii, kawałka drutu i gwoździa (Delta 1/2012). Ktoś powiedziałby, że już prościej się nie da, a jednak! Dziś zachęcamy do zbudowania i eksperymentów z zadziwiająco prostym silnikiem elektrycznym, który nie tylko będzie wykonywał ruch obrotowy, ale również się toczył.
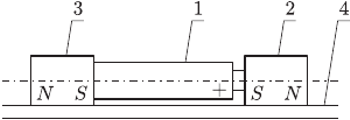
Rys. 1 Sposób zestawienia elementów silnika; 1 - bateria typu "paluszek", 2, 3 - walcowe magnesy neodymowe, 4 - folia aluminiowa,  - bieguny magnesów
- bieguny magnesów
Rys. 1 Sposób zestawienia elementów silnika; 1 - bateria typu "paluszek", 2, 3 - walcowe magnesy neodymowe, 4 - folia aluminiowa,  - bieguny magnesów
- bieguny magnesów
Do zbudowania silnika potrzebne będą: kawałek folii aluminiowej o rozmiarach około  okrągła bateria typu "paluszek" (najlepiej alkaliczna i jeszcze nieużywana) oraz dwa magnesy neodymowe w kształcie walca o średnicy nieco większej niż średnica baterii i długości 10-15 mm. Magnesy można kupić w sklepach z artykułami elektronicznymi (lub przez internet) - ich cena wynosi kilka złotych za sztukę.
okrągła bateria typu "paluszek" (najlepiej alkaliczna i jeszcze nieużywana) oraz dwa magnesy neodymowe w kształcie walca o średnicy nieco większej niż średnica baterii i długości 10-15 mm. Magnesy można kupić w sklepach z artykułami elektronicznymi (lub przez internet) - ich cena wynosi kilka złotych za sztukę.

Jeden ze zbudowanych silników
Żeby zbudować, a właściwie zestawić nasz silnik, wystarczy przyłożyć płaskie ściany magnesów do obu końców baterii i umieścić ją na kawałku folii, leżącej na poziomej powierzchni (Rys. 1). Dla prawidłowego działania silnika należy spełnić dwa warunki: magnesy muszą być skierowane do baterii biegunami jednoimiennymi i przyłożone do niej współosiowo. Żeby spełnić pierwszy warunek, przed przyłożeniem magnesów zbliżamy je płaskimi stronami i sprawdzamy, czy się odpychają. Dla spełnienia drugiego warunku sprawdzamy wzrokowo, czy brzeg każdego z magnesów wystaje tyle samo poza brzeg baterii. Ponadto folia powinna być gładka i leżeć na dokładnie poziomej powierzchni z dala od wszelkich przedmiotów ferromagnetycznych.
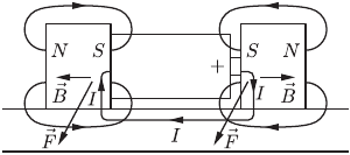
Rys. 2 Wyjaśnienie zasady działania silnika;  - indukcja pola magnetycznego,
- indukcja pola magnetycznego,  - natężenie prądu,
- natężenie prądu,  - siła elektrodynamiczna,
- siła elektrodynamiczna,  - bieguny magnesów.
- bieguny magnesów.
Gdy do baterii przyłożone zostaną północne bieguny magnesów  (czyli odwrotnie niż na rysunku), albo gdy dodatni biegun baterii znajdzie się po lewej stronie, bateria potoczy się w przeciwnym kierunku.
(czyli odwrotnie niż na rysunku), albo gdy dodatni biegun baterii znajdzie się po lewej stronie, bateria potoczy się w przeciwnym kierunku.
Rys. 2 Wyjaśnienie zasady działania silnika;  - indukcja pola magnetycznego,
- indukcja pola magnetycznego,  - natężenie prądu,
- natężenie prądu,  - siła elektrodynamiczna,
- siła elektrodynamiczna,  - bieguny magnesów.
- bieguny magnesów.
Gdy do baterii przyłożone zostaną północne bieguny magnesów  (czyli odwrotnie niż na rysunku), albo gdy dodatni biegun baterii znajdzie się po lewej stronie, bateria potoczy się w przeciwnym kierunku.
(czyli odwrotnie niż na rysunku), albo gdy dodatni biegun baterii znajdzie się po lewej stronie, bateria potoczy się w przeciwnym kierunku.
Gdy tak przygotowaną baterię z magnesami położymy na folii, wówczas ze zdumieniem zauważymy, że zaczyna się ona toczyć. Spróbujmy odpowiedzieć na pytanie, dlaczego tak się dzieje i od czego zależy kierunek tego ruchu? W tym celu pomocny będzie rysunek 2 Magnesy neodymowe pokryte są ochronną warstwą niklu, który dobrze przewodzi prąd elektryczny. Folia aluminiowa, chociaż w powietrzu pokrywa się cienką warstewką tlenku, to również jest niezłym przewodnikiem. Magnesy neodymowe są przyciągane do stalowej obudowy baterii i kontaktują się z jej biegunami. Gdy położymy baterię z magnesami na folii, to wówczas zamknie się obwód elektryczny i prąd popłynie od dodatniego bieguna baterii przez stykający się z nim magnes i folię znajdującą się pod baterią do magnesu, dotykającego ujemnego bieguna baterii. Prąd ten rozpływa się po powierzchni magnesów i folii. Jego gęstość jest jednak największa wzdłuż linii o najmniejszym oporze elektrycznym. Dlatego z dobrym przybliżeniem można przyjąć, że przepływ prądu odbywa się radialnie przez magnesy do miejsc ich kontaktu z folią. Ponieważ kierunek namagnesowania magnesów jest osiowy, to płynący w nich radialnie prąd jest prostopadły do kierunku ich wektora indukcji magnetycznej  W tej sytuacji na magnesy działają siły elektrodynamiczne
W tej sytuacji na magnesy działają siły elektrodynamiczne  skierowane stycznie do podstawy walca. Siły te dają momenty sił względem punktów kontaktu magnesów z folią. Pod działaniem tych momentów zachodzi obrót magnesów wraz z baterią i ich toczenie się po folii. Kierunek ruchu baterii zależy od wzajemnej orientacji przestrzennej biegunów magnesów i baterii (Rys. 2).
skierowane stycznie do podstawy walca. Siły te dają momenty sił względem punktów kontaktu magnesów z folią. Pod działaniem tych momentów zachodzi obrót magnesów wraz z baterią i ich toczenie się po folii. Kierunek ruchu baterii zależy od wzajemnej orientacji przestrzennej biegunów magnesów i baterii (Rys. 2).
Spróbujemy teraz oszacować moment sił elektrodynamicznych, działających na baterię oraz moc i sprawność naszego silnika. Siła elektrodynamiczna  wyraża się wzorem
wyraża się wzorem
 |
(1) |
w którym  oznacza indukcję pola magnetycznego,
oznacza indukcję pola magnetycznego,  - natężenie prądu, a
- natężenie prądu, a  - długość przewodnika. Dla zastosowanych magnesów neodymowych wartość
- długość przewodnika. Dla zastosowanych magnesów neodymowych wartość  zmierzono miernikiem hallotronowym, otrzymując
zmierzono miernikiem hallotronowym, otrzymując  Ze względu na bardzo mały opór warstwy niklu na magnesach i folii bateria pracuje praktycznie w stanie zwarcia. W tej sytuacji natężenie prądu
Ze względu na bardzo mały opór warstwy niklu na magnesach i folii bateria pracuje praktycznie w stanie zwarcia. W tej sytuacji natężenie prądu  można zmierzyć przyłączonym do niej bezpośrednio amperomierzem, którego opór również pomijamy. Pomiar taki dał wynik
można zmierzyć przyłączonym do niej bezpośrednio amperomierzem, którego opór również pomijamy. Pomiar taki dał wynik  Jako
Jako  przyjęto promień magnesu
przyjęto promień magnesu  wynoszący 5 mm, czyli 0,005 m. Stąd obliczono
wynoszący 5 mm, czyli 0,005 m. Stąd obliczono  Jest to bardzo mała wartość - dla porównania ciężar jednego kg to 9,81 N. Dlatego też ruch naszego silnika zatrzymuje małe nachylenie powierzchni, na której leży folia albo jej niewielkie nierówności. Całkowity moment sił elektrodynamicznych
Jest to bardzo mała wartość - dla porównania ciężar jednego kg to 9,81 N. Dlatego też ruch naszego silnika zatrzymuje małe nachylenie powierzchni, na której leży folia albo jej niewielkie nierówności. Całkowity moment sił elektrodynamicznych  napędzający silnik obliczamy ze wzoru
napędzający silnik obliczamy ze wzoru
 |
(2) |
Po podstawieniu wcześniej przyjętych wartości ze wzoru (2) dostajemy  .
.
Ponieważ bateria z magnesami toczy się, czyli jednocześnie wykonuje ruch obrotowy i postępowy, to obliczając moc użyteczną silnika  musimy uwzględnić te dwa ruchy. Stąd też i ze znanych z podstaw mechaniki wzorów piszemy wzór
musimy uwzględnić te dwa ruchy. Stąd też i ze znanych z podstaw mechaniki wzorów piszemy wzór
 |
(3) |
gdzie symbol  we wzorze (3) oznacza prędkość kątową baterii, która jest związana z jej prędkością liniową zależnością
we wzorze (3) oznacza prędkość kątową baterii, która jest związana z jej prędkością liniową zależnością  Zakładając, że ruch baterii szybko staje się jednostajny, prędkość liniową
Zakładając, że ruch baterii szybko staje się jednostajny, prędkość liniową  obliczono ze wzoru
obliczono ze wzoru  Stąd też, po uprzednim zmierzeniu czasu jej ruchu
Stąd też, po uprzednim zmierzeniu czasu jej ruchu  na drodze
na drodze  otrzymano
otrzymano  Po podstawieniu tej wartości oraz wartości wcześniej obliczonych do wzoru (3) uzyskano
Po podstawieniu tej wartości oraz wartości wcześniej obliczonych do wzoru (3) uzyskano  W. Moc dostarczona do silnika
W. Moc dostarczona do silnika  to moc prądu elektrycznego płynącego z baterii. Obliczymy ją ze wzoru
to moc prądu elektrycznego płynącego z baterii. Obliczymy ją ze wzoru  w którym
w którym  to napięcie zmierzone na biegunach baterii i równe w przybliżeniu jej sile elektromotorycznej. Dla użytej baterii
to napięcie zmierzone na biegunach baterii i równe w przybliżeniu jej sile elektromotorycznej. Dla użytej baterii  Uwzględniając ten wynik oraz wcześniej zmierzoną wartość
Uwzględniając ten wynik oraz wcześniej zmierzoną wartość  mamy
mamy  Na koniec możemy obliczyć sprawność silnika
Na koniec możemy obliczyć sprawność silnika  Po podstawieniu wcześniejszych wyników otrzymujemy
Po podstawieniu wcześniejszych wyników otrzymujemy  Jak widać, sprawność naszego silnika jest bardzo mała. Większość energii elektrycznej zamienia się na ciepło, co łatwo poczujemy własnymi palcami już po kilkudziesięciu sekundach użytkowania silnika. Wniosek końcowy jest taki, że z powodu bardzo małej sprawności nasz silnik chyba nie znajdzie praktycznego zastosowania, ale za to na pewno jest fascynującą zabawką edukacyjną.
Jak widać, sprawność naszego silnika jest bardzo mała. Większość energii elektrycznej zamienia się na ciepło, co łatwo poczujemy własnymi palcami już po kilkudziesięciu sekundach użytkowania silnika. Wniosek końcowy jest taki, że z powodu bardzo małej sprawności nasz silnik chyba nie znajdzie praktycznego zastosowania, ale za to na pewno jest fascynującą zabawką edukacyjną.