Domowe Eksperymenty Fizyczne
Zrób to sam
Silniki magnetohydrodynamiczne
Magnetohydrodynamika to badanie oddziaływania pól magnetycznych z płynami (cieczami i gazami) przewodzącymi prąd elektryczny. Typowymi takimi płynami są ciekłe metale (np. rtęć), zjonizowane gazy (plazma) oraz elektrolity, stanowiące najczęściej wodne roztwory kwasów, zasad i soli. W proponowanych w tym odcinku doświadczeniach wykorzystamy oddziaływanie pola magnetycznego na elektrolit do zbudowania silnika przetwarzającego dostarczoną do niego energię elektryczną na energię kinetyczną ruchu.
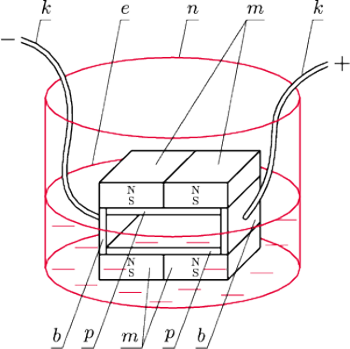
Rys. 1 Budowa liniowego silnika magnetohydrodynamicznego z magnesami
trwałymi:
 – płytka izolacyjna,
– płytka izolacyjna,
 – płytka miedziana,
– płytka miedziana,
 – elektrolit,
– elektrolit,
 – przewody,
– przewody,
 – naczynie,
– naczynie,
 – magnesy.
– magnesy.
Rys. 1 Budowa liniowego silnika magnetohydrodynamicznego z magnesami
trwałymi:
 – płytka izolacyjna,
– płytka izolacyjna,
 – płytka miedziana,
– płytka miedziana,
 – elektrolit,
– elektrolit,
 – przewody,
– przewody,
 – naczynie,
– naczynie,
 – magnesy.
– magnesy.
Do zbudowania modelu silnika potrzebne będą: niewielki słoik, woda, sól kuchenna, trzy płaskie baterie albo trzy duże baterie okrągłe (typu R20), kilka mniejszych magnesów używanych do przytrzymywania kartek na tablicy lub lodówce, kawałek blaszki miedzianej o grubości ok. 0,2 mm i rozmiarach kilkunastu cm, szczypta sproszkowanego korka lub zmielonego pieprzu, ok. 1 m cienkiego, jednożyłowego przewodu w izolacji, klej cyjanoakrylowy, silikon do uszczelnień w małej tubce, pinezka, 20–30 m drutu nawojowego o średnicy ok. 0,5 mm w izolacji z emalii, kilka izolacyjnych płytek o grubości ok. 1 mm i rozmiarach kilku centymetrów (mogą być płytki z uszkodzonych obwodów drukowanych), kawałek grubego styropianu o rozmiarach ok. 20 cm, lutownica, cyna, piłka do metalu i nożyczki.
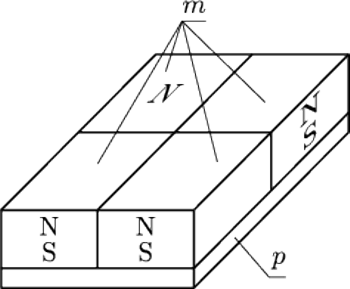
Rys. 2 Wygląd płytki z magnesami;
 – bieguny magnesu.
– bieguny magnesu.
Rys. 2 Wygląd płytki z magnesami;
 – bieguny magnesu.
– bieguny magnesu.
Budowany silnik przedstawiony jest na rysunku 1. Silnik ten można nazwać liniowym, ponieważ będzie w nim zachodził ruch postępowy elektrolitu. Najpierw przygotujemy elektrolit, którym będzie nasycony roztwór soli kuchennej: do wody łyżeczką dosypujemy soli kuchennej i mieszamy do rozpuszczenia, powtarzając to kilka razy, aż sól przestanie się rozpuszczać. Baterie łączymy szeregowo (plus jednej z minusem następnej) przylutowanymi kawałkami przewodów. Do skrajnych biegunów baterii też przylutowujemy po jednym kawałku przewodu. Przycinamy dwie kwadratowe płytki izolacyjne, do takich rozmiarów, żeby można było je swobodnie położyć na dnie słoika, oraz dwie płytki z blaszki miedzianej, których jeden bok będzie miał taką samą długość jak bok płytek izolacyjnych. Drugi bok płytek miedzianych powinien mieć długość równą w przybliżeniu połowie wysokości słoika. Obie pary płytek sklejamy, łącząc klejem cyjanoakrylowym boki o tej samej długości, tak by otrzymać prostopadłościenne, otwarte z obu stron pudełko. Do zewnętrznych powierzchni płytek izolacyjnych przyklejamy prostopadłościenne lub dyskowe magnesy, jak na rysunku 2. Na każdej z płytek wszystkie magnesy powinny być zorientowane jednoimiennymi biegunami w tę samą stronę i umieszczone jeden przy drugim. Do płytek miedzianych przylutowujemy odizolowane końcówki przewodów. Następnie wkładamy otrzymany układ płytek z magnesami do słoika i nalewamy tyle elektrolitu, żeby sięgał nieco poniżej górnej krawędzi płytek. Wolne końcówki przewodów łączymy ze skrajnymi biegunami poprzednio przygotowanych baterii. Posypujemy powierzchnię elektrolitu sproszkowanym korkiem lub pieprzem. Jak zachowuje się elektrolit?
Okazuje się, że w tym przypadku elektrolit z jednej strony wpływa do układu płytek z magnesami, a z drugiej z niego wypływa. Ruch elektrolitu spowodowany jest przez siłę Lorentza, która jest prostopadła do kierunku indukcji pola magnetycznego i do kierunku przepływu prądu. W naszym silniku kierunek przepływu prądu elektrycznego jest poziomy i prostopadły do płytek miedzianych, a kierunek wektora indukcji magnetycznej pionowy. Siła elektrodynamiczna ma więc kierunek poziomy i równoległy do płytek miedzianych. Możemy łatwo zbadać, jak na ruch elektrolitu wpływa zmiana liczby włączonych baterii oraz odwrócenie biegunów baterii i magnesów.
Zamiast z blaszki miedzianej, elektrody można wykonać z grubej folii aluminiowej (np. z foremki do pieczenia tart) i złączyć brzegi przez zagięcie. W przypadku użycia baterii płaskich łatwo połączyć ich bieguny spinaczami biurowymi. Szybszy obrót uzyskalibyśmy, stosując zamiast roztworu soli kuchennej wodny roztwór kwasu siarkowego o stężeniu ok. 10%, ponieważ ma on mniejszą oporność właściwą, co umożliwia przepływ prądu o większym natężeniu. Trzeba jednak pamiętać, że kwas siarkowy jest silnie żrący – powoduje oparzenia skóry, oczu, zniszczenie tkanin oraz podrażnienie dróg oddechowych – i dlatego może być użyty jedynie pod opieką nauczyciela. W warunkach domowych można natomiast bez obaw wypróbować ocet zamiast roztworu soli kuchennej.
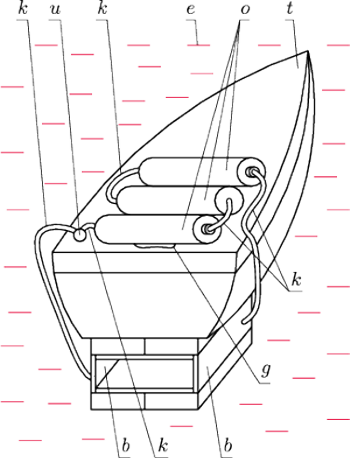
Rys. 3 Budowa łódeczki napędzanej liniowym silnikiem magnetohydrodynamicznym;
 – kadłub,
– kadłub,
 – bateria,
– bateria,
 – silikon,
– silikon,
 – pinezka.
– pinezka.
Rys. 3 Budowa łódeczki napędzanej liniowym silnikiem magnetohydrodynamicznym;
 – kadłub,
– kadłub,
 – bateria,
– bateria,
 – silikon,
– silikon,
 – pinezka.
– pinezka.
Opisany wyżej liniowy silnik magnetohydrodynamiczny możemy wykorzystać do napędu pływającego modelu łódeczki (Rys. 3). W tym celu ze styropianu wycinamy kadłub łódeczki. Od góry przyklejamy do niego połączone baterie, a od dołu układ płytek z magnesami, używając w tym celu silikonu do uszczelnień (klej cyjanoakrylowy rozpuszcza styropian). Wkładamy model do wanny lub miski napełnionej elektrolitem. Może się okazać, że wyporność użytego styropianu nie wystarcza do utrzymania modelu na powierzchni elektrolitu – wówczas wydłużamy kadłub, doklejając silikonem odpowiednio przycięty kawałek styropianu. Jeden z przewodów odchodzących od baterii przylutowujemy do dowolnej płytki miedzianej, a drugi owijamy wokół pinezki, którą wbijamy od góry w pokład łódeczki. Pod główkę tej pinezki będziemy wsuwać odizolowaną końcówkę drugiego przewodu, przylutowanego do drugiej płytki miedzianej, uzyskując przez to prosty wyłącznik. Umieszczamy model na środku naczynia z elektrolitem, wsuwamy końcówkę przewodu pod łepek pinezki i obserwujemy, co się dzieje. Widzimy, iż z układu płytek pod działaniem siły Lorentza wypływa elektrolit, zaś na model, zgodnie z trzecią zasadą dynamiki Newtona, działa skierowana przeciwnie siła, powodująca jego powolne płynięcie.
Przy użyciu tych samych materiałów i narzędzi można zbudować także inne typy silników magnetohydrodynamicznych, np. powodujące wirowy ruch elektrolitu. Ich budowa opisana jest na stronie deltami.edu.pl.
Silniki magnetohydrodynamiczne mogą być używane do napędu dużych jednostek pływających, np. jachtów i łodzi podwodnych. Oczywiście, jednostki takie mogą pływać tylko w odpowiednio zasolonych wodach, ale takie występują w prawie wszystkich akwenach świata. Już około 20 lat temu w Japonii zbudowano kilkunastometrowej długości jacht z silnikiem magnetohydrodynamicznym, wyposażonym w elektromagnesy nadprzewodnikowe. Silniki takie mają szereg zalet, m.in. są bardzo proste i ciche, dzięki czemu nie powodują zaburzeń wody umożliwiających wykrycie pływającego obiektu. Dlatego też interesuje się nimi wojsko i wiele wyników badań zostaje utajnionych.