William Thurston i hipoteza geometryzacyjna
Pod koniec lata 2012 roku wśród matematyków rozeszła się wiadomość, że 21 sierpnia zmarł William Thurston, matematyk, laureat medalu Fieldsa. Gdy w październiku 2010 roku zmarł Benoît Mandelbrot, pisały o tym niemal wszystkie gazety, informowały portale społecznościowe. O śmierci Thurstona dowiedzieli się – jak to najczęściej bywa w przypadku matematyków – głównie specjaliści. William Thurston zasłynął z postawienia, pod koniec lat siedemdziesiątych XX stulecia, hipotezy geometryzacyjnej i prób jej udowodnienia. Za te osiągnięcia, a miał jeszcze wiele innych, został uhonorowany medalem Fieldsa na Międzynarodowym Kongresie Matematyków w Warszawie w 1983 roku.
Spróbujmy się przyjrzeć, na czym polega hipoteza geometryzacyjna i jakie jest jej znaczenie.
Z dużym uproszczeniem można ją sformułować, na przykład, tak
Każda trójwymiarowa rozmaitość zamknięta może być „kanonicznie” rozłożona na prostsze cegiełki-podrozmaitości, z których każda jest wyposażona w jedną z ośmiu „kanonicznych” geometrii.
Rozszyfrujmy występujące w tej wypowiedzi terminy. Obiektami, których
dotyczy hipoteza geometryzacyjna, są rozmaitości, a dokładniej rozmaitości
trójwymiarowe. Przypomnijmy krótko, że rozmaitość topologiczna
wymiaru
 jest to obiekt (przestrzeń topologiczna), który lokalnie
wygląda jak przestrzeń
jest to obiekt (przestrzeń topologiczna), który lokalnie
wygląda jak przestrzeń
 A zatem rozmaitość trójwymiarowa,
dokładniej rozmaitość bez brzegu, lokalnie przypomina przestrzeń
trójwymiarową. Taka jest, oczywiście, sama przestrzeń
A zatem rozmaitość trójwymiarowa,
dokładniej rozmaitość bez brzegu, lokalnie przypomina przestrzeń
trójwymiarową. Taka jest, oczywiście, sama przestrzeń
 takie jest
wnętrze kuli czy torusa. Gdy dopuścimy brzeg (ma go, na przykład, kula
domknięta
takie jest
wnętrze kuli czy torusa. Gdy dopuścimy brzeg (ma go, na przykład, kula
domknięta
 ), to jego punkty będą miały otoczenia wyglądające jak
półprzestrzeń domknięta. Jednym z najważniejszych problemów od samego
początku był problem klasyfikacji rozmaitości, czyli zrobienia pełnej listy
obiektów z wyraźnym kryterium ich rozróżniania. Matematykom udało się
sklasyfikować rozmaitości dwuwymiarowe, czyli powierzchnie. Zrobili to
w 1907 roku, wykorzystując wcześniejsze wyniki Möbiusa, Jordana i Dycka,
Max Dehn i Poul Heegaard.
), to jego punkty będą miały otoczenia wyglądające jak
półprzestrzeń domknięta. Jednym z najważniejszych problemów od samego
początku był problem klasyfikacji rozmaitości, czyli zrobienia pełnej listy
obiektów z wyraźnym kryterium ich rozróżniania. Matematykom udało się
sklasyfikować rozmaitości dwuwymiarowe, czyli powierzchnie. Zrobili to
w 1907 roku, wykorzystując wcześniejsze wyniki Möbiusa, Jordana i Dycka,
Max Dehn i Poul Heegaard.
Po tym sukcesie kolej przyszła na przestrzenie trójwymiarowe. Wydawało się, że odpowiednio uogólniając i rozszerzając metody, które doskonale sprawdziły się w przypadku dwuwymiarowym, uda się opisać „przestrzenie trójwymiarowe”, jak wtedy często nazywano 3-rozmaitości. Naturalnie matematycy mieli świadomość, że nie będzie to tylko proste uogólnienie. Nie spodziewali się jednak, że trudności okażą się aż tak ogromne. Świat rozmaitości trójwymiarowych jest niezwykle bogaty i – mimo sugestywnej nazwy „trójwymiarowe” – niepoddający się łatwo intuicji. Pojawiły się nowe, zaskakujące, trudne do uchwycenia efekty.
Już sama sfera trójwymiarowa sprawiała ogromne kłopoty. Potrzebna była jej prosta charakteryzacja jako obiektu odgrywającego, jak słusznie przypuszczano, kluczową rolę w klasyfikacji. Tak narodziła się Hipoteza Poincarégo, która – mimo wielu wysiłków – pozostawała nietknięta w swej klasycznej postaci.
Matematycy z jednej strony próbowali opisać ogólne konstrukcje
3-rozmaitości, a z drugiej sklasyfikować pewne wybrane ich rodziny. Pierwszą
ogólną konstrukcję dla 3-rozmaitości zaproponował wspomniany już
Heegaard. Każdą rozmaitość trójwymiarową można otrzymać przez
sklejenie brzegiem dwóch
 -krotnych pełnych torusów – nazywanych
torusami genusu
-krotnych pełnych torusów – nazywanych
torusami genusu

Inny pomysł podsunął Max Dehn w 1910 roku, proponując wycinanie ze sfery trójwymiarowej otoczek tubularnych węzłów lub splotów (mówiąc potocznie: węzłów i splotów zrobionych z grubej liny, czyli obiektów topologicznie identycznych z torusami lub sumami mnogościowymi torusów) i ponowne ich wklejanie, tylko w inny sposób. Takie procedury nazwano chirurgiami Dehna. W tym przypadku znów okazało się, że można tak skonstruować każdą 3-rozmaitość, lecz problem z jednoznacznością pozostał.
Rys. 1
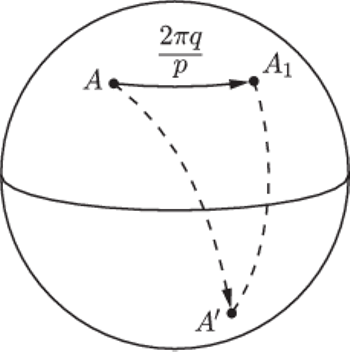
Przestrzenie soczewkowe (soczewki), pierwszy raz opisane przez Tietzego, są przykładem pierwszej rodziny 3-rozmaitości całkowicie scharakteryzowanych i sklasyfikowanych.
Soczewki można opisać na wiele sposobów, jeden z nich wygląda tak:
wybieramy dwie liczby naturalne względnie pierwsze
 i
i
 Na
powierzchni kuli (czyli, oczywiście, na sferze) zaznaczamy „równik”. Teraz
każdy punkt górnej półsfery obracamy o kąt
Na
powierzchni kuli (czyli, oczywiście, na sferze) zaznaczamy „równik”. Teraz
każdy punkt górnej półsfery obracamy o kąt
 i odbijamy
symetrycznie względem równika, a następnie tak otrzymany punkt sklejamy
z wyjściowym (Rys. 1). Powstaje właśnie przestrzeń soczewkowa oznaczana
i odbijamy
symetrycznie względem równika, a następnie tak otrzymany punkt sklejamy
z wyjściowym (Rys. 1). Powstaje właśnie przestrzeń soczewkowa oznaczana
 Udało się w pełni scharakteryzować soczewki w zależności
od
Udało się w pełni scharakteryzować soczewki w zależności
od
 i
i

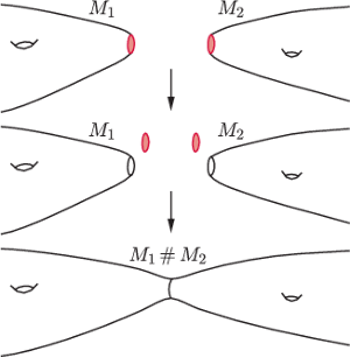
Rys. 2 Schemat powstawania sumy spójnej powierzchni.
Gdy przyjrzymy się bliżej klasyfikacji 2-rozmaitości, czyli powierzchni, to zauważymy, że każdą można zbudować z kilku, a dokładnie z trzech, prostszych cegiełek. Tymi najprostszymi powierzchniami są: sfera, torus (tym razem powierzchnia) i płaszczyzna rzutowa, a operacją łączącą jest suma spójna. Polega ona na tym, że z każdej powierzchni wycinamy kawałki homeomorficzne z kołami, a następnie sklejamy brzegi (Rys. 2).
Pomysł rozkładu rozmaitości trójwymiarowych na bardziej elementarne składniki podjął Hellmuth Kneser, który przedstawił w 1929 roku następujące twierdzenie.
Twierdzenie. Każda trójwymiarowa rozmaitość zamknięta może być rozłożona jednoznacznie, z dokładnością do kolejności składników, na sumę spójną rozmaitości pierwszych.
Sumę spójną dla rozmaitości trójwymiarowych konstruujemy podobnie jak w przypadku powierzchni, tylko zamiast kół wycinamy kule i sklejenia dokonujemy wzdłuż sfer. Przypomnijmy, że przez rozmaitości zamknięte rozumie się rozmaitości spójne, zwarte i bez brzegu. Natomiast rozmaitości pierwsze są w pewnym sensie odpowiednikiem liczb pierwszych: rozmaitość pierwsza nie da się rozłożyć na sumę spójną prostszych składników. Inaczej, jeśli rozmaitość pierwszą przedstawimy jako sumę dwóch innych rozmaitości, to jedną z nich jest sfera trójwymiarowa, która w tym działaniu (gdy sumę spójną uznamy za działanie) pełni rolę elementu neutralnego.
Twierdzenie Knesera sprowadza więc problem klasyfikacji do spisania
kompletnej listy rozmaitości pierwszych. Jednak – inaczej niż w przypadku
dwuwymiarowym – tych rozmaitości jest wiele, znacznie więcej niż trzy, i nie
znano wówczas dobrej metody ich wyszukiwania. Kneser opisał możliwość
rozkładu, lecz nie pokazał, jak powinny wyglądać cegiełki rozkładu. Takie
rozmaitości jak
 przestrzeń rzutowa
przestrzeń rzutowa
 czy przestrzenie
soczewkowe są przykładami rozmaitości pierwszych, ale istnieje jeszcze wiele
innych wymyślnych konstrukcji, jak choćby odpowiednie sklejanie ścian
różnych wielościanów.
czy przestrzenie
soczewkowe są przykładami rozmaitości pierwszych, ale istnieje jeszcze wiele
innych wymyślnych konstrukcji, jak choćby odpowiednie sklejanie ścian
różnych wielościanów.
W każdym razie ostatecznie stwierdzono, że rozkład rozmaitości
 na sumę spójną rozmaitości prostych można opisać następująco
na sumę spójną rozmaitości prostych można opisać następująco

Podział składników wiąże się z pewnymi własnościami dotyczącymi grupy
podstawowej zdefiniowanej przez Poincarégo, a opisującej zachowanie się
pętli w danej rozmaitości. Dla rozmaitości
 grupa jest
cykliczna i nieskończona – po prostu
grupa jest
cykliczna i nieskończona – po prostu
 – wiadomo, że są to
jedyne rozmaitości spełniające ten warunek. Rozmaitości z rodziny
– wiadomo, że są to
jedyne rozmaitości spełniające ten warunek. Rozmaitości z rodziny
 mają grupę podstawową skończoną, a
mają grupę podstawową skończoną, a
 – nieskończoną
i niecykliczną.
– nieskończoną
i niecykliczną.
W latach sześćdziesiątych XX wieku zauważono (ogromne zasługi ma tu Wolfgang Haken, znany przede wszystkim z dowodu twierdzenia o czterech barwach), że do rozkładu 3-rozmaitości na „mniejsze” składniki można wykorzystać nie tylko sfery, lecz również inne powierzchnie. Pierwszym kandydatem naturalnie stał się torus – najprostsza po sferze powierzchnia zamknięta. I odniesiono pewien sukces: prawdziwe jest analogiczne do twierdzenia Knesera twierdzenie o rozkładzie rozmaitości nieredukowalnej za pomocą torusów.
Nie wchodząc w szczegóły, twierdzenie to, często nazywane twierdzeniem JSJ (od nazwisk autorów: Jaco, Shalen, Johansson), mówi, że w zamkniętej nieredukowalnej (czyli takiej, w której każda sfera ogranicza kulę) 3-rozmaitości można znaleźć skończoną rodzinę odpowiednio położonych torusów rozdzielających tę rozmaitość na zwarte 3-rozmaitości torusowo nieredukowalne i tak zwane rozmaitości włókniste Seiferta.
Torusowa nieredukowalność jest odpowiednikiem zwykłej sferycznej
nieredukowalności. Rozmaitości włókniste Seiferta pojawiły się w tym
samym czasie, co rozmaitości sferyczne. Mówiąc znów niezbyt precyzyjnie, są
to rozmaitości, które dadzą się przedstawić jako sumy okręgów, a każdy
z tych okręgów ma otoczenie torusowe spełniające ewentualnie dodatkowe
warunki. Wiele rozmaitości ma tę cechę, a wśród nich sfera
 znana
już
znana
już
 i przestrzenie soczewkowe. Seifert podał pełny układ
niezmienników charakteryzujących rozmaitości włókniste nazwane jego
imieniem.
i przestrzenie soczewkowe. Seifert podał pełny układ
niezmienników charakteryzujących rozmaitości włókniste nazwane jego
imieniem.
Taką sytuację zastał William Thurston pod koniec lat siedemdziesiątych. Przyjrzał się wnikliwie twierdzeniom o rozkładzie, sklasyfikowanym już rodzinom 3-rozmaitości i wykorzystał pewien stary pomysł pochodzący z czasów Poincarégo i Kleina. Mianowicie Poincaré i Klein zauważyli, że każdą z dwuwymiarowych powierzchni można jednoznacznie wyposażyć w jeden z trzech typów geometrii gwarantujący pewne porządne przedstawienie tejże powierzchni (stałą krzywiznę). Z punktu widzenia tych geometrii powierzchnia w każdym punkcie lokalnie wygląda jednakowo – tak się zachowuje zwykła płaszczyzna lub sfera. Wyróżnione geometrie to: geometria lokalnie euklidesowa (paraboliczna), hiperboliczna (nawiązująca do geometrii Łobaczewskiego) i sferyczna (eliptyczna). Lokalnie euklidesowo wyglądają torus i butelka Kleina (płaszczyznę, walec i wstęgę Möbiusa pomijamy jako niezwarte), sferycznie – naturalnie sfera i płaszczyzna rzutowa, a wszystkie pozostałe mogą być wyposażone w strukturę hiperboliczną.
W przypadku trójwymiarowym taka sytuacja nie jest możliwa. Nie da się każdej 3-rozmaitości wyposażyć w tak porządne geometrie. Thurston zauważył jednak, że wiele sklasyfikowanych rozmaitości z różnych rodzin dopuszcza jedną z, tym razem, ośmiu typów wzorcowych geometrii tak, że w otoczeniu każdego punktu rozmaitość wygląda jednakowo z punktu widzenia tych wyróżnionych geometrii – nazywa się to jednorodnością geometrii. Pojawił się więc pomysł, że może tylko te osiem typów wystarczy, gdy zastosujemy rozkład na sumę spójną, a następnie wzdłuż torusów. Thurston rzeczywiście udowodnił, że dla 3-rozmaitości istnieje dokładnie osiem typów geometrii spełniających warunek jednorodności.
Tak narodziła się hipoteza geometryzacyjna, która, mimo oczywistych analogii do przypadku dwuwymiarowego, zaskoczyła matematyków zmagających się z problemem klasyfikacji. Mało kto mógł się spodziewać, że metody geometryczne mogą okazać się przydatne w problemach topologicznych. Próby klasyfikacji 3-rozmaitości sprowadzały się głównie do wyszukiwania coraz to bardziej subtelnych narzędzi (niezmienników), przede wszystkim na gruncie topologii. Hipoteza geometryzacyjna, jeśli tylko jest prawdziwa, rozstrzyga wiele starych problemów, między innymi klasyczną hipotezę Poincarégo, a także pytania o charakteryzacje wybranych rodzin rozmaitości, jak choćby rozmaitości sferyczne konstruowane ze sfery trójwymiarowej poprzez działanie na niej różnych grup.
Thurstonowi udało się rozstrzygnąć hipotezę dla licznej rodziny 3-rozmaitości, wiele jednak broniło się skutecznie. W szczególności rozmaitości dopuszczające strukturę hiperboliczną (powstające, między innymi, przez odpowiednie sklejanie ścian wielościanów) okazały się wyjątkowo oporne. Od co najmniej 2006 roku wiemy, że hipoteza geometryzacyjna jest twierdzeniem. Dzięki oryginalnym pomysłom Richarda Hamiltona, wyjątkowo lakonicznym pracom Perelmana oraz wysiłkom wielu matematyków udało się pokonać jeden z najważniejszych problemów topologii rozmaitości trójwymiarowych. Thurston, formułując śmiałą hipotezę, zwrócił uwagę na ogromną siłę tkwiącą w metodach geometrycznych.
 (przypomnijmy: klasyczny torus-powierzchnia to
(przypomnijmy: klasyczny torus-powierzchnia to
 ), czyli
mamy tu do czynienia z jedną dziurą. A dziur, jak wiadomo, może być
więcej.
), czyli
mamy tu do czynienia z jedną dziurą. A dziur, jak wiadomo, może być
więcej.