Informatyczny kącik olimpijski
Optymalna trasa łazika
Tym razem na warsztat weźmiemy zadanie Remote Rover, które pojawiło się na jednym z konkursów TopCoder w roku 2005. Naszym zadaniem jest znalezienie najszybszej trasy dla marsjańskiego łazika poruszającego się po zróżnicowanym terenie.
Teren ten możemy przedstawić jako prostokąt, w którym początkowe położenie łazika i punkt docelowy są jego przeciwległymi wierzchołkami. Prostokąt jest podzielony na  poziomych pasów o różnej szerokości; każdy z pasów charakteryzuje się inną prędkością maksymalną, którą może osiągać na nim łazik. A konkretnie:
poziomych pasów o różnej szerokości; każdy z pasów charakteryzuje się inną prędkością maksymalną, którą może osiągać na nim łazik. A konkretnie:  -ty pas jest ograniczony prostymi
-ty pas jest ograniczony prostymi  oraz
oraz  a łazik może na nim jechać z prędkością
a łazik może na nim jechać z prędkością 
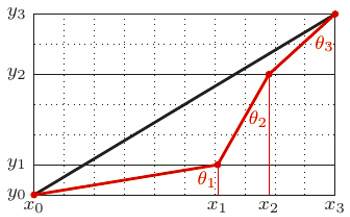
Na rysunku obok przedstawiono przykładowy teren, w którym szukamy najszybszej drogi między punktami  i
i  Podzielony jest na
Podzielony jest na  pasy, o kolejnych szerokościach 1, 3 i 2 (wyznaczone przez proste
pasy, o kolejnych szerokościach 1, 3 i 2 (wyznaczone przez proste  i
i  ) i prędkościach przejazdu
) i prędkościach przejazdu  i
i  Czas przejazdu drogą w linii prostej wynosi
Czas przejazdu drogą w linii prostej wynosi  najkrótszy zaś czas przejazdu równy
najkrótszy zaś czas przejazdu równy  uzyskamy, jadąc dłużej pasem dopuszczającym większą prędkość łazika, a konkretnie przejeżdżając przez zaznaczone kolorem punkty
uzyskamy, jadąc dłużej pasem dopuszczającym większą prędkość łazika, a konkretnie przejeżdżając przez zaznaczone kolorem punkty  i
i 
Jest jasne, że najszybsza droga między dwoma punktami na płaszczyźnie przebiega po linii prostej, ale tylko w przypadku terenu o jednakowej charakterystyce. Tak więc jeśli wyznaczymy punkty  przez które łazik będzie przejeżdżał, zmieniając pasy, to droga będzie prowadzić odcinkami łączącymi te punkty.
przez które łazik będzie przejeżdżał, zmieniając pasy, to droga będzie prowadzić odcinkami łączącymi te punkty.
Czas potrzebny na pokonanie tej drogi wyraża się wzorem
 |
Naszym zadaniem jest znalezienie zmiennych  minimalizujących wartość funkcji
minimalizujących wartość funkcji  Odpowiada to znalezieniu punktu, w którym zerują się wszystkie pochodne cząstkowe funkcji
Odpowiada to znalezieniu punktu, w którym zerują się wszystkie pochodne cząstkowe funkcji  Pochodna po zmiennej
Pochodna po zmiennej  jest następująca:
jest następująca:

Jeśli przez  oznaczymy kąt pomiędzy linią pionową a odcinkiem łączącym punkty
oznaczymy kąt pomiędzy linią pionową a odcinkiem łączącym punkty  i
i  to dostaniemy
to dostaniemy
 |
zatem pochodna po  upraszcza się do
upraszcza się do
 |

Jeśli więc pochodne cząstkowe względem wszystkich zmiennych  mają być równe zero, to musi być spełniony następujący układ równań:
mają być równe zero, to musi być spełniony następujący układ równań:
 |
(*) |
Zauważmy, że ustalenie wartości  powoduje jednoznaczne wyznaczenie pozostałych wartości kątów, a to z kolei wyznacza nam wartości zmiennych
powoduje jednoznaczne wyznaczenie pozostałych wartości kątów, a to z kolei wyznacza nam wartości zmiennych  oraz pewną wartość zmiennej
oraz pewną wartość zmiennej  przy czym niekoniecznie równą długości prostokąta. Innymi słowy, przy ustalonym
przy czym niekoniecznie równą długości prostokąta. Innymi słowy, przy ustalonym  układ (*) określa, jakie warunki musi spełniać najszybsza droga do górnego boku prostokąta, a uzyskana wartość
układ (*) określa, jakie warunki musi spełniać najszybsza droga do górnego boku prostokąta, a uzyskana wartość  oznacza położenie ostatniego punktu na tej drodze. Widać, że
oznacza położenie ostatniego punktu na tej drodze. Widać, że  jest monotoniczną funkcją zmiennej
jest monotoniczną funkcją zmiennej  (zwiększenie
(zwiększenie  powoduje zwiększenie wszystkich pozostałych kątów), więc możemy zastosować wyszukiwanie binarne, aby znaleźć taką wartość
powoduje zwiększenie wszystkich pozostałych kątów), więc możemy zastosować wyszukiwanie binarne, aby znaleźć taką wartość  że
że  Należy jednak pamiętać o przypadku, gdy dla dużych kątów przy rozwiązywaniu układu (*) rozwiązanie nie będzie istnieć (gdy prawa strona jednego z równań będzie większa niż 1).
Należy jednak pamiętać o przypadku, gdy dla dużych kątów przy rozwiązywaniu układu (*) rozwiązanie nie będzie istnieć (gdy prawa strona jednego z równań będzie większa niż 1).
Na koniec wspomnijmy, że wzór (*) może być znany Czytelnikom z lekcji fizyki, gdzie pod nazwą prawa Snella opisywał zmianę kierunku biegu promienia światła przy przejściu przez granicę między dwoma ośrodkami o różnych współczynnikach załamania (zależnych od prędkości światła w tych ośrodkach). Jaki jest związek między naszym zadaniem, a zachowaniem się światła w różnych ośrodkach, pozostawiamy Czytelnikom do samodzielnego zbadania.