Problemy 3sum-trudne w geometrii

Kiedy rozwiązujemy jakiś problem informatyczny, często naszym celem jest
podanie jak najefektywniejszego algorytmu. Jednak czasem możemy natknąć
się przy tym na „ścianę” – danego problemu nie da się rozwiązać tak
efektywnie, jak byśmy tego chcieli. Najpowszechniej znanym przykładem
opisanego zjawiska jest klasa problemów NP-zupełnych. O problemach z tej
klasy (a należy do niej wiele naturalnych i praktycznych zagadnień)
podejrzewa się, że nie da się ich rozwiązać w czasie wielomianowym
względem rozmiaru danych wejściowych. Niestety, tylko podejrzewa się,
a rozstrzygnięcie tej hipotezy (znanej też jako
 ?) jest obecnie
najsłynniejszym otwartym problemem informatyki teoretycznej.
?) jest obecnie
najsłynniejszym otwartym problemem informatyki teoretycznej.
Na szczęście wiele ważnych problemów obliczeniowych umiemy
rozwiązywać w czasie wielomianowym. Jednak w praktyce wielomian
wielomianowi nierówny – jest przecież istotne, czy dany problem umiemy
rozwiązać w czasie
 czy też w czasie
czy też w czasie
 Okazuje
się, że także w przypadku problemów rozwiązywalnych w czasie
wielomianowym (tzw. klasa problemów P) znane są pewne narzędzia
pozwalające stwierdzić, że danego problemu zapewne nie da się rozwiązać
w czasie szybszym niż taki a taki, a jeśli nawet się da, to jest to bardzo
trudne.
Okazuje
się, że także w przypadku problemów rozwiązywalnych w czasie
wielomianowym (tzw. klasa problemów P) znane są pewne narzędzia
pozwalające stwierdzić, że danego problemu zapewne nie da się rozwiązać
w czasie szybszym niż taki a taki, a jeśli nawet się da, to jest to bardzo
trudne.
W tym artykule skupimy naszą uwagę na następującym problemie:
Problem (3SUM). Dany
jest zbiór
 złożony z
złożony z
 liczb całkowitych. Czy istnieją takie
liczby
liczb całkowitych. Czy istnieją takie
liczby
 że
że




Wszystkie omawiane w tym artykule problemy mają charakter decyzyjny, tzn. odpowiedzią w każdym z nich jest pojedyncza wartość logiczna. Na potrzeby naszego artykułu przyjmiemy następującą definicję redukcji problemu:
Definicja. Powiemy, że problem
 można zredukować
do problemu
można zredukować
do problemu
 w czasie
w czasie
 jeśli dowolną instancję
(czyli dane wejściowe) problemu
jeśli dowolną instancję
(czyli dane wejściowe) problemu
 o rozmiarze
o rozmiarze
 można
przekształcić w czasie
można
przekształcić w czasie
 w stałą liczbę instancji problemu
w stałą liczbę instancji problemu
 o rozmiarze
o rozmiarze
 tak, żeby na podstawie odpowiedzi
dla wyznaczonych instancji problemu
tak, żeby na podstawie odpowiedzi
dla wyznaczonych instancji problemu
 można było udzielić
odpowiedzi dla rozważanej instancji problemu
można było udzielić
odpowiedzi dla rozważanej instancji problemu

Będziemy wówczas pisali, że
 co oznacza tyle, że problem
co oznacza tyle, że problem
 jest co najmniej tak trudny jak problem
jest co najmniej tak trudny jak problem
 gdyż jeśli umiemy
w czasie
gdyż jeśli umiemy
w czasie
 rozwiązać problem
rozwiązać problem
 to umiemy w takim
samym czasie rozwiązać problem
to umiemy w takim
samym czasie rozwiązać problem
 Jeśli
Jeśli
 oraz
oraz
 to będziemy pisali, że
to będziemy pisali, że

Problemem, który będziemy redukować do innych zagadnień, jest
wspomniany już problem
 . Przez wiele lat znany był algorytm
rozwiązujący ten problem w czasie
. Przez wiele lat znany był algorytm
rozwiązujący ten problem w czasie
 (patrz zadanie 1 na marginesie)
i uważano, że nie da się go rozwiązać w złożoności mniejszej niż
(patrz zadanie 1 na marginesie)
i uważano, że nie da się go rozwiązać w złożoności mniejszej niż
 Wprowadzono też klasę problemów
Wprowadzono też klasę problemów
 -trudnych, czyli
problemów, do których można zredukować problem
-trudnych, czyli
problemów, do których można zredukować problem
 w czasie
w czasie
 Od 2005 roku wiadomo jednak, że problem
Od 2005 roku wiadomo jednak, że problem
 można
rozwiązać troszeczkę szybciej, a mianowicie w czasie
można
rozwiązać troszeczkę szybciej, a mianowicie w czasie

Mimo tego usprawnienia wciąż nie widać nadziei na znalezienie algorytmu
rozwiązującego ten problem w czasie istotnie lepszym niż

Zadanie 2. W problemie
 elementy
elementy
 mogą się powtarzać. Nie ma to jednak większego
znaczenia, gdyż w czasie
mogą się powtarzać. Nie ma to jednak większego
znaczenia, gdyż w czasie
 można łatwo identyfikować
instancje problemu, dla których istnieje rozwiązanie z powtarzającymi się
elementami. Jak to zrobić?
można łatwo identyfikować
instancje problemu, dla których istnieje rozwiązanie z powtarzającymi się
elementami. Jak to zrobić?
Będziemy także używać następującego bliźniaczego problemu
 ,
który jest równoważny z problemem
,
który jest równoważny z problemem
 (tj.
(tj.
 ):
):
Problem. Dane są trzy zbiory liczb całkowitych
 zawierające
łącznie
zawierające
łącznie
 elementów. Czy istnieją liczby
elementów. Czy istnieją liczby
 i
i
 takie że
takie że

Zadanie 3. Udowodnij, że


 , tzn. pokaż,
jak wykonać obie redukcje. Przykłady różnych redukcji znajdziesz
w dalszej części artykułu.
, tzn. pokaż,
jak wykonać obie redukcje. Przykłady różnych redukcji znajdziesz
w dalszej części artykułu.
Problemy, które będziemy rozważać w dalszej części tekstu, mają
charakter geometryczny. Jako pierwszy rozpatrzymy problem nazywany
 – podstawowy problem
– podstawowy problem
 -trudny w geometrii,
służący jako narzędzie do dowodzenia
-trudny w geometrii,
służący jako narzędzie do dowodzenia
 -trudności innych
problemów. Jest on określony następująco:
-trudności innych
problemów. Jest on określony następująco:
Problem. Danych jest
 punktów kratowych
położonych na prostych
punktów kratowych
położonych na prostych
 i
i
 Czy istnieje prosta
inna niż pozioma przechodząca przez jakieś trzy spośród tych punktów?
Czy istnieje prosta
inna niż pozioma przechodząca przez jakieś trzy spośród tych punktów?
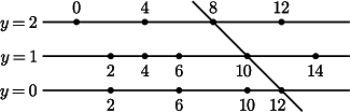
Rys. 1 Instancja problemu
 otrzymana z instancji
otrzymana z instancji


 problemu
problemu
 . Wynikiem jest
. Wynikiem jest

Rys. 1 Instancja problemu
 otrzymana z instancji
otrzymana z instancji


 problemu
problemu
 . Wynikiem jest
. Wynikiem jest

Po chwili namysłu nietrudno dostrzec tu podobieństwo do problemu
 . Nie jest to przypadek; zachodzi bowiem
. Nie jest to przypadek; zachodzi bowiem
 .
Przeprowadzimy tylko redukcję
.
Przeprowadzimy tylko redukcję
 , redukcja
w drugą stronę jest właściwie taka sama. Wystarczy mianowicie dla
każdej liczby
, redukcja
w drugą stronę jest właściwie taka sama. Wystarczy mianowicie dla
każdej liczby
 wybrać punkt
wybrać punkt
 na prostej
na prostej
 dla każdej liczby
dla każdej liczby
 – punkt
– punkt
 a dla
każdej liczby
a dla
każdej liczby
 – punkt
– punkt
 patrz rysunek 1. Punkty
patrz rysunek 1. Punkty
 i
i
 są współliniowe, gdy
są współliniowe, gdy

czyli dokładnie gdy
 Stąd odpowiedź dla otrzymanej instancji
problemu
Stąd odpowiedź dla otrzymanej instancji
problemu
 jest pozytywna wtedy i tylko wtedy, gdy pozytywna
jest odpowiedź dla odpowiadającej jej instancji problemu
jest pozytywna wtedy i tylko wtedy, gdy pozytywna
jest odpowiedź dla odpowiadającej jej instancji problemu
 , a to jest
dokładnie to, co chcieliśmy uzyskać.
, a to jest
dokładnie to, co chcieliśmy uzyskać.
Problem
 , jakkolwiek użyteczny, nie jest sam w sobie
nadmiernie interesujący. Dużo ciekawszy jest podobny do niego następujący
problem:
, jakkolwiek użyteczny, nie jest sam w sobie
nadmiernie interesujący. Dużo ciekawszy jest podobny do niego następujący
problem:
Problem (3PointsOnLine). Na płaszczyźnie danych
jest
 punktów. Czy istnieje prosta przechodząca przez jakieś trzy
spośród tych punktów?
punktów. Czy istnieje prosta przechodząca przez jakieś trzy
spośród tych punktów?
Ten problem także jest
 -trudny; tym razem redukcję
przeprowadzimy wprost z problemu
-trudny; tym razem redukcję
przeprowadzimy wprost z problemu
 . Niech
. Niech
 będzie
instancją problemu
będzie
instancją problemu
 . Dla każdej liczby
. Dla każdej liczby
 rysujemy na
płaszczyźnie punkt
rysujemy na
płaszczyźnie punkt
 Zbadajmy, kiedy trzy różne tak otrzymane
punkty
Zbadajmy, kiedy trzy różne tak otrzymane
punkty
 i
i
 są współliniowe:
są współliniowe:

Okazuje się zatem, że punkty
 i
i
 są
współliniowe wtedy i tylko wtedy, gdy liczby
są
współliniowe wtedy i tylko wtedy, gdy liczby
 stanowią rozwiązanie
problemu
stanowią rozwiązanie
problemu
 . W ten sposób otrzymujemy żądaną redukcję problemu
. W ten sposób otrzymujemy żądaną redukcję problemu
 do problemu
do problemu
 , pod warunkiem, że w tym
pierwszym problemie interesują nas tylko trójki różnych liczb. To jednak
możemy zapewnić (patrz zad. 2).
, pod warunkiem, że w tym
pierwszym problemie interesują nas tylko trójki różnych liczb. To jednak
możemy zapewnić (patrz zad. 2).
Wytrawny znawca geometrii natychmiast zauważy, że
 -trudność
problemu
-trudność
problemu
 implikuje bezpośrednio
implikuje bezpośrednio
 -trudność
dualnego problemu:
-trudność
dualnego problemu:
Problem (dualny 3PointsOnLine). Na płaszczyźnie danych jest
 prostych. Czy któreś trzy proste przecinają się w jednym punkcie?
prostych. Czy któreś trzy proste przecinają się w jednym punkcie?
Zadanie 4. Określmy przekształcenie geometryczne
 które
punktowi
które
punktowi
 przyporządkowuje prostą
przyporządkowuje prostą
 a prostej
a prostej
 przyporządkowuje
punkt
przyporządkowuje
punkt
 Udowodnij, że punkt
Udowodnij, że punkt
 leży na
prostej
leży na
prostej
 wtedy i tylko wtedy, gdy prosta
wtedy i tylko wtedy, gdy prosta
 przechodzi
przez punkt
przechodzi
przez punkt
 (Więcej na temat tej dualności Czytelnik znajdzie
w numerze 8/2013 Delty.)
(Więcej na temat tej dualności Czytelnik znajdzie
w numerze 8/2013 Delty.)
Wróćmy teraz do problemu
 . Skoro reklamowaliśmy go
jako przydatne narzędzie w geometrii, to najwyższy czas, aby podać kilka jego
zastosowań. Wykazaliśmy już, że jest to problem
. Skoro reklamowaliśmy go
jako przydatne narzędzie w geometrii, to najwyższy czas, aby podać kilka jego
zastosowań. Wykazaliśmy już, że jest to problem
 -trudny. Jeśli
zatem pokażemy redukcję z tego problemu do jakiegoś innego problemu
geometrycznego działającą w czasie
-trudny. Jeśli
zatem pokażemy redukcję z tego problemu do jakiegoś innego problemu
geometrycznego działającą w czasie
 to w ten sposób wykażemy,
że ów drugi problem również jest
to w ten sposób wykażemy,
że ów drugi problem również jest
 -trudny. Pierwszym
problemem z tej serii, który weźmiemy pod lupę, jest:
-trudny. Pierwszym
problemem z tej serii, który weźmiemy pod lupę, jest:
Problem (Separator). Na płaszczyźnie danych jest
 odcinków.
Czy istnieje prosta nieprzecinająca żadnego z nich, dzieląca zbiór tych
odcinków na dwa niepuste podzbiory? Jeśli chcemy, możemy założyć,
że podane odcinki są parami rozłączne.
odcinków.
Czy istnieje prosta nieprzecinająca żadnego z nich, dzieląca zbiór tych
odcinków na dwa niepuste podzbiory? Jeśli chcemy, możemy założyć,
że podane odcinki są parami rozłączne.
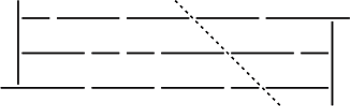
Rys. 2 Redukcja instancji problemu
 z rysunku 1 do instancji problemu
z rysunku 1 do instancji problemu
 .
.
Rys. 2 Redukcja instancji problemu
 z rysunku 1 do instancji problemu
z rysunku 1 do instancji problemu
 .
.
Sprowadzimy problem
 do problemu
do problemu
 . Tym
razem redukcja będzie działać w czasie
. Tym
razem redukcja będzie działać w czasie
 gdyż wymagać
będzie sortowania. Posortujemy punkty na każdej z prostych poziomych
i połączymy pary kolejnych punktów odcinkami w taki sposób, żeby między
każdymi dwoma kolejnymi odcinkami występował bardzo mały odstęp,
o długości równej
gdyż wymagać
będzie sortowania. Posortujemy punkty na każdej z prostych poziomych
i połączymy pary kolejnych punktów odcinkami w taki sposób, żeby między
każdymi dwoma kolejnymi odcinkami występował bardzo mały odstęp,
o długości równej
 Widzimy już, że przy tej konstrukcji prosta
rozdzielająca zbiór odcinków, przechodząca przez trzy odstępy, odpowiada
trójce punktów współliniowych należących do różnych prostych
poziomych. Należy jeszcze zadbać o wyeliminowanie poziomych prostych
rozdzielających. Wystarczy w tym celu umieścić dwa pionowe odcinki po
bokach konstrukcji i ustawić je „na zakładkę” z odcinkami poziomymi, tak aby
z kolei wyeliminować trywialne proste rozdzielające pionowe (Rys. 2). W ten
sposób wykazaliśmy, że
Widzimy już, że przy tej konstrukcji prosta
rozdzielająca zbiór odcinków, przechodząca przez trzy odstępy, odpowiada
trójce punktów współliniowych należących do różnych prostych
poziomych. Należy jeszcze zadbać o wyeliminowanie poziomych prostych
rozdzielających. Wystarczy w tym celu umieścić dwa pionowe odcinki po
bokach konstrukcji i ustawić je „na zakładkę” z odcinkami poziomymi, tak aby
z kolei wyeliminować trywialne proste rozdzielające pionowe (Rys. 2). W ten
sposób wykazaliśmy, że
 .
.

Kolejny przykład. Okazuje się, że problem
 możemy
zredukować do następującego, całkiem naturalnego i mającego liczne
zastosowania praktyczne problemu:
możemy
zredukować do następującego, całkiem naturalnego i mającego liczne
zastosowania praktyczne problemu:
Problem (PlanarMotionPlanning). Na płaszczyźnie
danych jest
 odcinków-przeszkód i jeden odcinek reprezentujący
robota. Czy robot może się przedostać z zadanej pozycji początkowej do
zadanej pozycji końcowej, przemieszczając się jedynie za pomocą ciągłych
przesunięć i obrotów bez dotykania żadnej z przeszkód? Znów, jeśli
chcemy, możemy założyć, że odcinki-przeszkody są parami rozłączne.
odcinków-przeszkód i jeden odcinek reprezentujący
robota. Czy robot może się przedostać z zadanej pozycji początkowej do
zadanej pozycji końcowej, przemieszczając się jedynie za pomocą ciągłych
przesunięć i obrotów bez dotykania żadnej z przeszkód? Znów, jeśli
chcemy, możemy założyć, że odcinki-przeszkody są parami rozłączne.
Redukcja jest tutaj podobna jak poprzednio. Przeszkodami będą odcinki
poziome z wcześniejszej redukcji. Robota umieścimy poniżej całej
konstrukcji, a jego celem będzie przedostanie się powyżej konstrukcji. Sam
robot będzie na tyle długi, żeby nie mógł przedostać się na drugą stronę
inaczej niż tylko przez trzy odstępy naraz. Należy jeszcze zadbać, aby robot
nie mógł ominąć całej konstrukcji bokiem. W tym celu trzeba poniżej
i powyżej konstrukcji zbudować „klatki” uniemożliwiające ucieczkę
robota do „nieskończoności”. W ten sposób otrzymujemy wniosek, że
 .
.
To, co przedstawiliśmy do tej pory, to tylko niewielka grupa znanych
problemów
 -trudnych. Dla Niestrudzonych Czytelników mamy
w zanadrzu jeszcze kilka innych takich problemów – tym razem już
dowody pominiemy. Zacznijmy od jeszcze jednego pomocniczego problemu
-trudnych. Dla Niestrudzonych Czytelników mamy
w zanadrzu jeszcze kilka innych takich problemów – tym razem już
dowody pominiemy. Zacznijmy od jeszcze jednego pomocniczego problemu
 -trudnego:
-trudnego:
Problem (SegmentsContainPoints). Na prostej danych jest
 punktów i
punktów i
 parami rozłącznych przedziałów.
Czy istnieje wektor, o który można przesunąć wszystkie zadane punkty,
tak aby każdy z nich znalazł się w jakimś przedziale?
parami rozłącznych przedziałów.
Czy istnieje wektor, o który można przesunąć wszystkie zadane punkty,
tak aby każdy z nich znalazł się w jakimś przedziale?
Problem ten można zredukować do każdego z następujących zagadnień
typu
 :
:
Problem (PolygonContainment). Na płaszczyźnie dane są dwa wielokąty,
odpowiednio o
 i
i
 bokach. Mamy do dyspozycji
pewien zestaw izometrii płaszczyzny. Czy za pomocą tych izometrii możemy
pierwszy z tych wielokątów umieścić wewnątrz drugiego, przy założeniu,
że:
bokach. Mamy do dyspozycji
pewien zestaw izometrii płaszczyzny. Czy za pomocą tych izometrii możemy
pierwszy z tych wielokątów umieścić wewnątrz drugiego, przy założeniu,
że:
- (a)
- wielokąty są dowolne i dopuszczamy dowolne przesunięcia;
- (b)
- wielokąty są wypukłe i dopuszczamy dowolne obroty;
- (c)
- wielokąty są wypukłe i dopuszczamy dowolne obroty i przesunięcia?
O wersji tego problemu, w której wielokąty są wypukłe i dopuszczamy dowolne przesunięcia (ale nie obroty), można przeczytać w artykule Tomasza Idziaszka „Zawieramy wielokąty”.
Zadanie 7. Opisz redukcję problemu
 do
problemu
do
problemu
 w wersji (a). Redukcja powinna
działać w czasie
w wersji (a). Redukcja powinna
działać w czasie
 Wskazówka: szukane wielokąty mają
kształt grzebieni.
Wskazówka: szukane wielokąty mają
kształt grzebieni.
A już na sam koniec kilka problemów
 -trudnych typu
-trudnych typu
 :
:
- (a)
- Czy dany zbiór
 dwustronnie nieskończonych pasków
(o różnych szerokościach i kierunkach) pokrywa zadany prostokąt?
dwustronnie nieskończonych pasków
(o różnych szerokościach i kierunkach) pokrywa zadany prostokąt?
- (b)
- Czy dany zbiór
 trójkątów pokrywa zadany trójkąt?
trójkątów pokrywa zadany trójkąt?
- (c)
- Czy pole sumy danych
 trójkątów jest mniejsze od ustalonej
liczby?
trójkątów jest mniejsze od ustalonej
liczby?
- (d)
- Czy suma danych
 trójkątów zawiera jakąś dziurę?
trójkątów zawiera jakąś dziurę?
- (e)
- Danych jest
 półpłaszczyzn. Czy istnieje punkt płaszczyzny
pokryty przez co najmniej
półpłaszczyzn. Czy istnieje punkt płaszczyzny
pokryty przez co najmniej
 spośród tych półpłaszczyzn?
spośród tych półpłaszczyzn?
