Teoria względności w smartfonie
Orbity satelitów systemu GPS
Gdy na przełomie XV i XVI wieku Krzysztof Kolumb przybijał z kolejnymi wyprawami do wybrzeży Ameryki, był przekonany, że są to wybrzeża Azji. W owych czasach określenie swojej pozycji na ziemskim globie nie było tak trywialnie proste jak dziś, kiedy prawie każdy ma w smartfonie odbiornik zdolny do określania aktualnego położenia z dokładnością do kilku metrów. Być może nie każdy wie, że działanie satelitarnych systemów pozycjonowania oparte jest na teorii względności Einsteina, i to zarówno szczególnej (STW), jak i ogólnej (OTW). Takiego zastosowania swojej teorii nie przewidywał zapewne nawet sam jej odkrywca.
Nie tylko GPS.
Obecnie funkcjonują (lub są na ukończeniu) cztery niezależne od siebie globalne systemy pozycjonowania satelitarnego. Najstarszy to amerykański GPS-NAVSTAR. Od wielu lat działa również rosyjski GLONASS. Zbudowany przez Unię Europejską Galileo właśnie uzyskuje pełną funkcjonalność, natomiast czwarty system (chiński BeiDou) ma być w pełni gotowy w 2020 roku. Oprócz tego Indie i Japonia pracują nad swoimi systemami, które jednak nie będą miały zasięgu globalnego, przynajmniej na początku.
Każdy z działających systemów funkcjonuje na tej samej zasadzie. Składa się z około 30 satelitów, z których kilka pełni rolę rezerwowych, a od 24 do 28 jest w użyciu. Satelity krążą na wysokości około 20 000 km i obiegają Ziemię w czasie zbliżonym do 12 godzin. Orbity zawarte są w różnych płaszczyznach, tak aby w każdej chwili z każdego miejsca na Ziemi widoczna była możliwie jak największa liczba satelitów (dla pełnej funkcjonalności widoczne muszą być co najmniej cztery). Każdy satelita ma na pokładzie bardzo precyzyjny zegar atomowy, i to zwykle nie jeden, aby zmniejszyć ryzyko wyłączenia satelity z powodu awarii zegara. Obecnie instaluje się najczęściej cztery działające niezależnie zegary w jednym satelicie.
Jak to działa?
Zegary zainstalowane na satelitach są ze sobą regularnie synchronizowane, a położenia wszystkich satelitów wyznaczane na podstawie parametrów ich orbit. Satelity nadają sygnał radiowy odbierany przez odbiornik naziemny, na przykład zainstalowany w smartfonie. W sygnale zakodowana jest chwila wysłania go przez satelitę. Ponieważ sygnał rozchodzi się ze skończoną prędkością światła, to chwila odebrania go przez nasz smartfon jest późniejsza niż chwila nadania go przez satelitę. Mnożąc różnicę czasów wysłania i odbioru przez prędkość światła, możemy wyznaczyć odległość do satelity. Wyznaczając odległość do trzech satelitów, których pozycję bardzo dokładnie znamy, bylibyśmy w stanie wyznaczyć położenie odbiornika. Sprowadza się to do geometrycznego problemu wyznaczenia punktu przecięcia trzech sfer o zadanych promieniach.
Niestety takie wyznaczanie położenia byłoby bardzo niedokładne, ze względu na zbyt małą precyzję zegara kwarcowego, w jaki wyposażony jest nasz smartfon. Błąd względny typowego zegara kwarcowego jest rzędu  (a często nawet większy), co daje błąd rzędu kilku sekund na miesiąc. Oznacza to, że już w pierwszej sekundzie po synchronizacji pomiar obarczony jest błędem
(a często nawet większy), co daje błąd rzędu kilku sekund na miesiąc. Oznacza to, że już w pierwszej sekundzie po synchronizacji pomiar obarczony jest błędem  co pomnożone przez prędkość światła daje niedokładność w wyznaczaniu odległości do satelity rzędu 300 m. Po godzinie od synchronizacji zegara kwarcowego z wzorcem czasu błąd przeliczony na odległość będzie większy niż odległość do księżyca. [O pomiarach czasu i zegarach atomowych pisał Krzysztof Pawłowski w Delcie 04/2016.] Dlatego tak istotne jest, aby zegary na satelitach były bardzo precyzyjne (błąd względny najdokładniejszych zegarów atomowych jest rzędu
co pomnożone przez prędkość światła daje niedokładność w wyznaczaniu odległości do satelity rzędu 300 m. Po godzinie od synchronizacji zegara kwarcowego z wzorcem czasu błąd przeliczony na odległość będzie większy niż odległość do księżyca. [O pomiarach czasu i zegarach atomowych pisał Krzysztof Pawłowski w Delcie 04/2016.] Dlatego tak istotne jest, aby zegary na satelitach były bardzo precyzyjne (błąd względny najdokładniejszych zegarów atomowych jest rzędu  ). Ponadto do dokładnego wyznaczenia położenia w trzech wymiarach potrzebujemy sygnałów z czterech satelitów (a nie trzech), aby móc uniezależnić pomiar od wskazań zegarka w odbiorniku.
). Ponadto do dokładnego wyznaczenia położenia w trzech wymiarach potrzebujemy sygnałów z czterech satelitów (a nie trzech), aby móc uniezależnić pomiar od wskazań zegarka w odbiorniku.
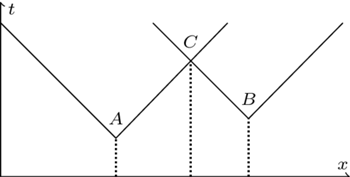
Rys. 2. W dwuwymiarowej czasoprzestrzeni mamy jeden wymiar przestrzenny  i wymiar czasowy
i wymiar czasowy  Zdarzenie
Zdarzenie  to jednoczesna rejestracja sygnałów od dwóch satelitów. Na podstawie treści sygnałów można określić, gdzie i kiedy zostały one wysłane przez satelity, czyli określić w czasoprzestrzeni zdarzenia
to jednoczesna rejestracja sygnałów od dwóch satelitów. Na podstawie treści sygnałów można określić, gdzie i kiedy zostały one wysłane przez satelity, czyli określić w czasoprzestrzeni zdarzenia  i
i  Ponieważ wiemy, że światło rozchodzi się w czasoprzestrzeni po stożkach, możemy znaleźć współrzędne zdarzenia
Ponieważ wiemy, że światło rozchodzi się w czasoprzestrzeni po stożkach, możemy znaleźć współrzędne zdarzenia  jako przecięcie dwóch stożków. Przy czym w dwóch wymiarach stożek to dwie linie proste
jako przecięcie dwóch stożków. Przy czym w dwóch wymiarach stożek to dwie linie proste
Rys. 2. W dwuwymiarowej czasoprzestrzeni mamy jeden wymiar przestrzenny  i wymiar czasowy
i wymiar czasowy  Zdarzenie
Zdarzenie  to jednoczesna rejestracja sygnałów od dwóch satelitów. Na podstawie treści sygnałów można określić, gdzie i kiedy zostały one wysłane przez satelity, czyli określić w czasoprzestrzeni zdarzenia
to jednoczesna rejestracja sygnałów od dwóch satelitów. Na podstawie treści sygnałów można określić, gdzie i kiedy zostały one wysłane przez satelity, czyli określić w czasoprzestrzeni zdarzenia  i
i  Ponieważ wiemy, że światło rozchodzi się w czasoprzestrzeni po stożkach, możemy znaleźć współrzędne zdarzenia
Ponieważ wiemy, że światło rozchodzi się w czasoprzestrzeni po stożkach, możemy znaleźć współrzędne zdarzenia  jako przecięcie dwóch stożków. Przy czym w dwóch wymiarach stożek to dwie linie proste
jako przecięcie dwóch stożków. Przy czym w dwóch wymiarach stożek to dwie linie proste
Z czterech sygnałów można wyliczyć nie tylko położenie miejsca rejestracji sygnału, ale również czas, kiedy rejestracja miała miejsce, czyli znaleźć współrzędne przestrzenne i współrzędną czasową zdarzenia w czterowymiarowej czasoprzestrzeni. Zdarzeniem jest chwila i miejsce odebrania sygnałów. Geometrycznie problem ten sprowadza się do znalezienia punktu przecięcia czterech trójwymiarowych stożków (po których rozchodzą się z prędkością światła sygnały z satelitów) zanurzonych w czterowymiarowej czasoprzestrzeni. Na rysunku przedstawiona jest uproszczona sytuacja wyznaczania położenia w dwuwymiarowej czasoprzestrzeni (jeden wymiar przestrzenny plus czas). W takim przypadku wystarczą dwa satelity, a stożek świetlny jest parą prostych. W trójwymiarowej czasoprzestrzeni (dwa wymiary przestrzenne plus czas) potrzebowalibyśmy trzech satelitów, a stożki byłyby dwuwymiarowymi powierzchniami zanurzonymi w trójwymiarowej czasoprzestrzeni, czyli wyglądałyby tak, jak zwykle wyobrażamy sobie stożek.
Warto podkreślić, że system pozwala wyznaczyć położenie w trzech wymiarach przestrzennych - nie tylko długość i szerokość geograficzną, ale też wysokość nad poziomem morza. Przydaje się to na przykład paralotniarzom rejestrującym trasę swojego lotu w trzech wymiarach, ale nie tylko im.
Diabeł tkwi w szczegółach.
Przetłumaczyliśmy problem wyznaczania pozycji na prosty problem geometryczny, ale niestety pominęliśmy w tym tłumaczeniu pewne istotne szczegóły. STW uczy nas, że jeżeli zegar względem nas się porusza, to chodzi wolniej niż identyczny zegar spoczywający względem nas. Zjawisko to nosi nazwę dylatacji czasu i oznacza, że z naszego punktu widzenia zegar atomowy na pokładzie poruszającego się satelity chodzi wolniej niż identyczny na Ziemi. Algorytm wykonujący obliczenia oczywiście uwzględnia tę poprawkę, ponieważ gdyby jej nie brać pod uwagę, to powodowałoby to istotne błędy w pozycjonowaniu.
Okazuje się jednak, że oprócz dylatacji czasu algorytm musi uwzględniać jeszcze jedną poprawkę, pochodzącą tym razem od OTW. Chodzi o to, że zegar na pokładzie satelity krąży w obszarze słabszego pola grawitacyjnego niż zegar stojący na powierzchni Ziemi, w dodatku znajduje się w stanie nieważkości. W pewnym uproszczeniu można powiedzieć, że pole grawitacyjne spowalnia bieg zegarów. Oznacza to, że grawitacja powoduje, że zegar na powierzchni Ziemi chodzi wolniej niż ten na orbicie. Poprawka pochodząca z OTW jest więc przeciwna do tej pochodzącej od STW!

Dla systemu GPS poprawki relatywistyczne są rzędu  przy czym poprawka od OTW jest około sześć razy większa niż ta od STW. Uwzględniająca oba efekty wypadkowa poprawka równa jest około
przy czym poprawka od OTW jest około sześć razy większa niż ta od STW. Uwzględniająca oba efekty wypadkowa poprawka równa jest około  na dobę (co po pomnożeniu przez prędkość światła daje około 11,4 km błędu po jednej dobie działania systemu). Dopiero po uwzględnieniu tej poprawki (oraz innych niezwiązanych z teorią względności) pozycjonowanie daje poprawne wyniki. A co by było, gdyby Einstein (ani nikt inny) nie odkrył OTW? Technika rakietowa mogłaby się rozwijać bez żadnych przeszkód. Ludzkość byłaby w stanie wysyłać satelity na orbitę. Do budowy zegarów atomowych również nie jest potrzebna znajomość OTW. Po wysłaniu zegarów atomowych na orbitę zobaczylibyśmy, że chodzą inaczej niż powinny, i nie potrafilibyśmy tego wyjaśnić. Zapewne wtedy ktoś wpadłby na pomysł, że to grawitacja wpływa na tempo upływu czasu, i OTW zostałaby prędzej czy później odkryta. Ciekawe jest jednak to, że OTW przewidywała te efekty na długo przed wysłaniem w kosmos pierwszego satelity. Wysyłając po raz pierwszy zegar atomowy na orbitę, ludzie spodziewali się, że będzie chodził szybciej niż identyczny na Ziemi, a pomiary tylko potwierdziły te przewidywania.
na dobę (co po pomnożeniu przez prędkość światła daje około 11,4 km błędu po jednej dobie działania systemu). Dopiero po uwzględnieniu tej poprawki (oraz innych niezwiązanych z teorią względności) pozycjonowanie daje poprawne wyniki. A co by było, gdyby Einstein (ani nikt inny) nie odkrył OTW? Technika rakietowa mogłaby się rozwijać bez żadnych przeszkód. Ludzkość byłaby w stanie wysyłać satelity na orbitę. Do budowy zegarów atomowych również nie jest potrzebna znajomość OTW. Po wysłaniu zegarów atomowych na orbitę zobaczylibyśmy, że chodzą inaczej niż powinny, i nie potrafilibyśmy tego wyjaśnić. Zapewne wtedy ktoś wpadłby na pomysł, że to grawitacja wpływa na tempo upływu czasu, i OTW zostałaby prędzej czy później odkryta. Ciekawe jest jednak to, że OTW przewidywała te efekty na długo przed wysłaniem w kosmos pierwszego satelity. Wysyłając po raz pierwszy zegar atomowy na orbitę, ludzie spodziewali się, że będzie chodził szybciej niż identyczny na Ziemi, a pomiary tylko potwierdziły te przewidywania.
Co jeszcze?
OTW przewidziała znacznie więcej. Oparty na OTW teoretyczny opis czarnych dziur pojawił się znacznie wcześniej, niż astronomowie znaleźli jakiekolwiek obserwacyjne przesłanki wskazujące na ich istnienie. Długo trwały spekulacje, czy takie obiekty rzeczywiście istnieją. Teraz proces zlewania się czarnych dziur obserwuje się bezpośrednio, rejestrując generowane w nim fale grawitacyjne, których istnienie również przewidziane było przez OTW w czasach, kiedy jego detekcja była technicznie niemożliwa. Fakt, że teoria, do której sformułowania Einstein doszedł w wyniku czysto teoretycznych rozważań, przewidziała tak wiele rzeczywiście zachodzących we Wszechświecie zjawisk, fascynuje kolejne pokolenia fizyków.
Jak Einstein na to wpadł?
Isaac Newton, oddając szacunek swoim poprzednikom, powiedział podobno: "Jeśli widzę dalej, to tylko dlatego, że stoję na ramionach olbrzymów". Na ramionach jakich olbrzymów stanął Einstein, żeby spojrzeć aż tak daleko? Praca Einsteina o STW z 1905 roku nosiła tytuł O elektrodynamice ciał w ruchu. To właśnie rozważania zawarte w tytule pracy, dotyczące elektrodynamiki klasycznej, doprowadziły go do sformułowania STW. W sformułowanej 10 lat później OTW posłużył się z kolei narzędziami geometrii różniczkowej - abstrakcyjnej i mało wówczas popularnej dziedziny matematyki.
Elektrodynamika klasyczna.
Anegdota głosi, że William Ewart Gladstone, będąc kanclerzem skarbu brytyjskiego rządu w latach pięćdziesiątych XIX wieku, odwiedził kiedyś laboratorium Michaela Faradaya. Zapytał wtedy o praktyczne zastosowania elektryczności. Faraday odpowiedział, że nie wie, jakie one będą, ale że "zapewne pewnego dnia będzie pan od tego pobierał podatki". Prawo indukcji odkryte przez Faradaya w 1831 roku pozwoliło mu zbudować pierwszą prądnicę, a potem silnik elektryczny. Jednak na początku nie doceniono potencjału, jaki miały w sobie te odkrycia.
Jeszcze na początku XIX wieku nie zdawano sobie sprawy, że jest jakikolwiek związek między elektrycznością i magnetyzmem. Przed odkryciem prądnicy przez Faradaya prąd elektryczny wytwarzano, wykorzystując skonstruowane przez Alessandro Voltę stosy elektryczne. Badania Ørsteda, Biota, Savarta i Ampère'a pokazały, że prądy elektryczne oddziałują z magnesami i ze sobą nawzajem. Ostatnią cegiełkę do tej układanki dodał James Clerk Maxwell, zauważając, że nie tylko przewodniki z prądem są źródłem pola magnetycznego (prawo Ampère'a), ale jest nim również zmienne pole elektryczne. Równania opisujące pole elektromagnetyczne, będące zwieńczeniem kilkudziesięciu lat badań - noszą teraz nazwę równań Maxwella - zostały opublikowane w 1865 roku. Maxwell wykazał następnie, że z jego równań wynika istnienie fal elektromagnetycznych (jak uważał wtedy, rozchodzących się w tzw. eterze), których prędkość doskonale zgadzała się z mierzoną wówczas prędkością światła.
Teoretyczne badania Josepha Larmora, Hendrika Lorentza i Henriego Poincaré z przełomu XIX i XX wieku doprowadziły do odkrycia, że równania Maxwella nie zmieniają swojej postaci, jeżeli współrzędne przestrzenne i czas zmienią się według przepisu zwanego obecnie transformacją Lorentza. Pierwotnie próbowano ją interpretować jako transformację z układu spoczywającego względem eteru do układu poruszającego się względem eteru.
Geometria różniczkowa.
W 1854 roku Bernhard Riemann miał wygłosić swój wykład habilitacyjny. Jak pisze Marek Kordos w swojej książce "Wykłady z historii matematyki", Carl Friedrich Gauss zażyczył sobie, żeby Riemann, który w swojej pracy zajmował się głównie analizą, przygotował dla odmiany coś z geometrii.
Badania nad tzw. geometriami nieeuklidesowymi były prowadzone już wcześniej. Sam Gauss rozwijał teorię zakrzywionych powierzchni zanurzonych w przestrzeni trójwymiarowej. Istniała przepiękna geometria Bolyaia-Łobaczewskiego (można o niej poczytać w Delcie 8/2018). Jak się później okazało, wszystkie te geometrie są przykładami, które można opisać w języku geometrii Riemanna. Riemann wprowadził pojęcie rozmaitości, czyli obiektu w pewnym sensie pozszywanego z małych, prawie euklidesowych łatek, tak jak typową piłkę nożną zszywa się z wielu prawie płaskich kawałków skóry, otrzymując powierzchnię sferyczną. W ten sposób można uzyskać w zasadzie dowolny gładki (tzn. bez zagięć) kształt, i to nie tylko dwuwymiarowej powierzchni. Rozmaitości mogą mieć dowolny wymiar, np. 3 lub 4 (jak czasoprzestrzeń).
Riemann zauważył, że rozmaitość można opisywać (lokalnie) za pomocą dowolnych współrzędnych, niekoniecznie takich, które odzwierciedlają relacje geometryczne pomiędzy punktami. Na przykład odległość może być skomplikowaną funkcją współrzędnych punktów. Niezależnie od tego, w jakim układzie współrzędnych ją obliczamy, powinno zawsze wychodzić tyle samo. Wprowadził więc sposób mierzenia długości i kątów między wektorami na rozmaitości, czyli metrykę Riemanna.
Wykład Riemanna nie wzbudził na początku dużego zainteresowania. Został opublikowany dopiero po kilkunastu latach przez fizyka Hermana Helmholtza. Rozwijaniem geometrii Riemanna zajęli się następnie Włosi (dlatego w podręcznikach OTW pojawiają się nazwiska: Ricci, Bianchi czy Levi-Civita), którzy rozwinęli również tzw. rachunek tensorowy.
Co dalej?
Einstein zrozumiał, że eter nie jest falom elektromagnetycznym do niczego potrzebny i że transformacja Lorentza jest poprawną transformacją pomiędzy poruszającymi się względem siebie obserwatorami. Tak powstała STW. Następnie Einstein wprowadził opis grawitacji jako zakrzywienia czasoprzestrzeni, a do opisu tej krzywej geometrii użył języka zaadaptowanej odpowiednio geometrii różniczkowej i rachunku tensorowego. Tak powstała OTW. Opisane poprawki do pozycjonowania GPS biorą się właśnie stąd, że czasoprzestrzeń, w której poruszamy się my i satelity, jest rozmaitością zakrzywioną, a nie euklidesową. Pamiętajmy o tym, kiedy smartfonowa nawigacja prowadzi nas na spotkanie ze znajomymi do pizzerii - może wymyślimy kolejne zastosowanie teorii względności.